|
斗轮堆取料机,是指一种用于大型干散货堆场的既能堆料又能取料的连续输送的高效装卸机械。由可俯仰和水平摆动的胶带输送臂及其前端的斗轮、机架、运行机构组成,皮带可双向运行,取料时由斗轮取料经输送臂送出,堆料时则由主输送机运来的货物经由输送臂投向堆场。 作为港口、电力、冶金等行业重要的散料装卸机械,斗轮堆取料机 操作目前还以人工操作为主,不仅具有工作环境恶劣、安全性低,准确性差、运行成本高等缺陷,同时作为重要的基础终端机械,因其人工操作形成的“信息孤岛”,极大的阻碍了智能燃料系统以及智能港口,智慧工厂的建设升级。 正向科技利用自动控制技术、格雷母线精确定位技术、激光三维扫描技术、图像监控技术、安全 防范技术等手段,自主设计开发了智能堆取料无人作业系统,融合了基于数学模拟建模技术与 快速激光扫描建模技术,通过料堆三维模型坐标数据,精准下刀作业。 结合无线通讯与控制技术,利用高精度定位系统、料位雷达、防碰撞雷达、微波开关防碰撞系统,通过远程视频监控系统及空间防碰撞系统,对料堆三维图形和数据进行分析。 结合料场操作作业工艺控制策略,开发自动堆料取料执行控制程序,从而实现全天候的堆取料远程控制,与全自动无人作业,实现堆取料作业生产管理与操作作业的标准化、自动化。 系统实现全天候、主动安全防护的全自动化作业,有效解决散货料场堆取料作业存在的作业要求高、劳动强度大、操作员健康与安全隐患、流程效率较低、信息化手段较低等主要问题,提高料场生产组织与管理水平,实现全天候煤场斗轮机的远程全自动控制,有效解决手动操作效率低下及恶劣环境带来的诸多问题,大大提升设备运行的安全性和经济性。 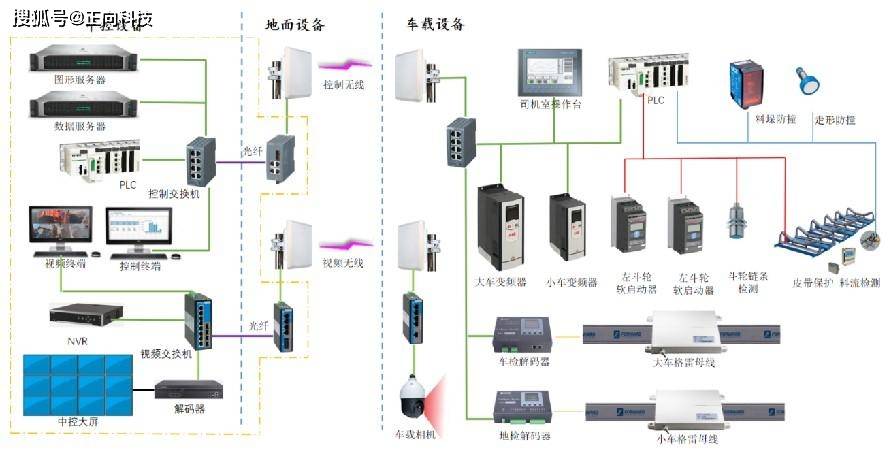 系统结构图 系统结构图此系统构成如下: - 堆形扫描采集系统(激光雷达扫描成像)
- 虚拟三维图像重构系统(图形处理算法)
- 移动设备定位系统(格雷母线精确定位,角度传感器)
- 防碰撞系统(设备与堆料,设备与设备之间放碰撞)
- 作业规则库系统(自动转换成设备操作指令)
- 物料信息跟踪管理系统(物料品种、数量、堆放区域等)
- 智能化调度系统(作业流程推荐、作业指令生成)
武汉正向科技是一家工业移动机车无人驾驶和无人操作技术的研发、生产和销售的高新技术企业,已经拥有格雷母线、光栅尺和码盘等多种定位技术,防摆技术和激光扫描三维建模技术,取得了技术专利及软著22项;通过了IS0质量、环境和职业健康安全三体系认证,特种设备生产许可证、安全生产许可证,为冶金、化工、铁路、电力、水泥和港口码头等行业客户提供产品和服务。 如需了解更多信息及价格行情,武汉正向科技欢迎您来电来司详询~
| 











